language

Con la fabricación flexible como núcleo, ayuda a las fábricas de todo el mundo a realizar la Industria 4.0
Máquina de ajuste de bloqueo de tornillo

Máquina de ajuste de bloqueo de tornillo




| Parámetros básicos | |
| Especificación del tornillo | M0.6~M8 |
| Potencia | 900 W |
| Fuente de alimentación | AC 220V |
| Repetibilidad | ±0.02mm |
| Longitud del brazo |
Eje X 100~700mm
Eje Y 100~300mm Eje Z 100mm |
|
Velocidad de movimiento |
Eje X/Y 1000 mm/s
Eje Z 500 mm/s |
| Opcional | |
| Visión de localización secundaria | 00 No /01 Sí |
| Visión en movimiento | 00 No/01 Sí |
| Detección de Altura Flotante | 00 No/01 Sí |
| Calibración Automática de Par | 00 No /01 Sí |
| Parámetros básicos | |
| Especificación del Tornillo | M0.6~M6 |
| Potencia | 1500 W |
| Fuente de Alimentación | AV220/10A |
| Longitud del brazo |
Brazo de Eje 1 de 325mm
Brazo de Eje 2 de 265mm |
|
Repetibilidad |
1~2 juntas: ±0.02mm
3 juntas: ±0.03mm |
| Opcional | |
| Visión de Localización Secundaria | 00 No /01 Sí |
| Visión en Movimiento | 00 No /01 Sí |
| Detección de Altura Flotante | 00 No /01 Sí |
| Calibración Automática de Par | 00 No /01 Sí |


| 1.5~3s/pcs | EFICIENCIA | 5s/pcs | |||
| 0~1/personas | MANO DE OBRA | 2~3/personas | |||
| Hasta 99.95% | RENDIMIENTO | Varía de persona a persona | |||
|
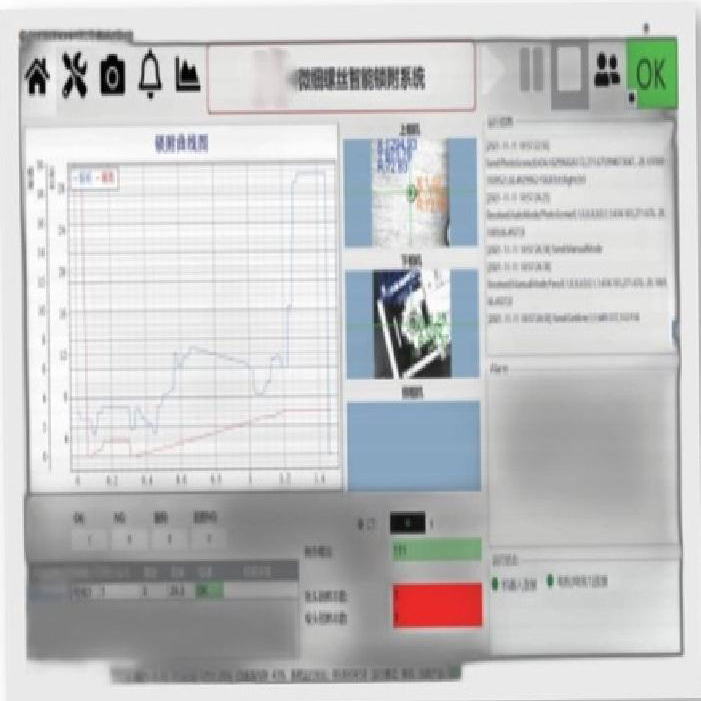
Monitoreo en tiempo real de todo el proceso de pago ajustado y oportuno
alarma en caso de anormalidad |
EXCEPCIÓN
MANEJO |
La detección manual es incontrolable | |||
|
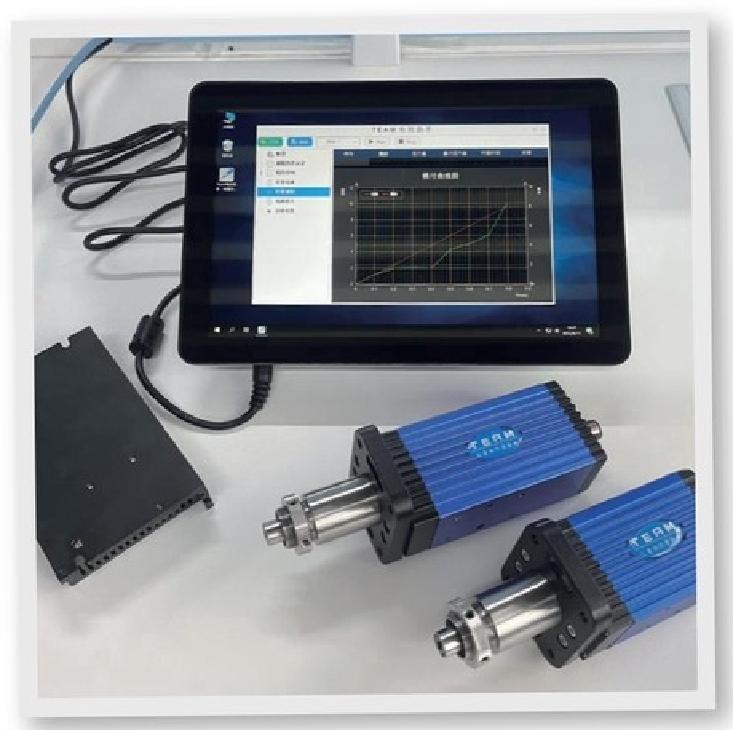
Alta precisión
control de par de alta precisión, monitoreo y ajuste de datos en tiempo real |
PAR
CONTROL |
Depender de la experiencia del empleado | |||
| Operación estable y casi sin costo de gestión | COSTOS DE GESTIÓN |
Alto volumen de rotación
tasa, calidad desigual del personal y alto costo de gestión |
|||
|
Inversión única sin
inversión continua |
COSTO DE ENTRADA |
Inversión continua
|
Industria de Aplicación
-
Electrónica 3C Para teléfonos móviles, tabletas, computadoras y otros productos electrónicos de consumo para proporcionar soluciones de apriete automático, ensamblaje automático flexibles.

-
Almacenamiento de energía Proporcionar una solución de apriete profundo automático para equipos pequeños de almacenamiento de energía.

-
Herramienta eléctrica Proporcionar solución de apriete de tornillo inteligente automática para herramientas eléctricas.

-
Automóvil Proporcionar soluciones de apriete de tornillos inteligentes para piezas de automóviles, partes interiores, electrónica automotriz, etc.






¿SABES
¿POR QUÉ ELEGIRNOS
¿CUÁL ES LA DIFERENCIA ENTRE APRIETE INTELIGENTE Y ROBOT DE PAGO?
-
Exclusivo para micro tornillos Diseñado especialmente para la investigación y desarrollo de tornillos micro, el más pequeño puede soportar un tornillo M0.6 apretado, en busca de mayor precisión;
-
Proceso de núcleo controlable Desarrollo independiente de componentes centrales y algoritmos de control, precisión de control de par hasta el 3%, para lograr una mayor profesionalidad;
-
El rendimiento del pago ajustado es mayor Software de pago ajustado propio, monitoreo en tiempo real del proceso de pago ajustado, más detección de deslizamiento táctico, detección de altura flotante, rendimiento de hasta el 99.95%, para lograr una mayor estabilidad;
-
Aplicación de escenarios complejos Explorar el escenario real de apriete y desarrollar productos adecuados para escenarios especiales como interferencia, avellanado, lateral, etc.,

que son adecuados para más complejos;


| DETECCIÓN DE PAR, NÚMERO DE VUELTAS, | ||
| ALTURA FLUCTUANTE, INCLINACIÓN Y DESLIZAMIENTO | ||
|
Juicio de resultado OK | |
|
Establecer par:√
Establecer número de vueltas:√ |
Por ejemplo, establezca el valor de par en 1Nm y apriete el número de vueltas a 10.
Después de que se ejecute el procedimiento de apriete, se retroalimentan los datos de monitoreo en tiempo real. Cuando el valor de par alcanza 1Nm y el número de vueltas alcanza las 10 vueltas, el software juzga que el resultado de apriete es OK y emite una señal OK. |
|

|
Juicio de resultado NG | |
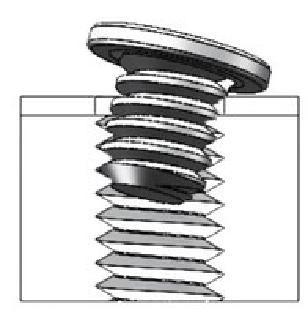
| 1. Detección de altura flotante | ||
|
Por ejemplo, establezca el valor de par en 1Nm y apriete
el número de vueltas a 10. Después de que se ejecute el procedimiento de apriete, el los datos de monitorización en tiempo real muestran que el valor de par alcanza 1Nm y el número de vueltas es solo 5. En este momento, el el software juzga que el resultado de apriete es NG y la categoría NG es flotante alto, y emite la señal NG. |
||
|
Establecer par:√
Número de vueltas establecido: × Resultado del juicio: altura flotante |
||
|
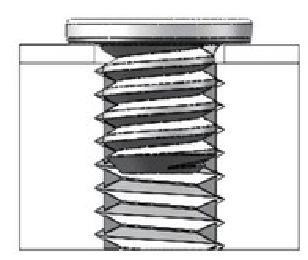
2. Detección de dientes deslizantes | |
| Por ejemplo, establezca el valor de par en 1Nm y apriete el número de vueltas a 10. | ||
|
Después de que se ejecute el procedimiento de apriete, los datos de monitorización en tiempo real
la retroalimentación muestra que el número de vueltas ha alcanzado 10, y el valor de par ha sido inferior a 1Nm. En este momento, el software juzga que el resultado de apriete es NG, y el la categoría NG es inactiva (hilo deslizante), y emite la señal NG. |
||
|
Establecer par: ×
Establecer el número de vueltas: √ Resultado del juicio: Inactivo (deslizamiento) |
||






CONTÁCTENOS
Contacto
Información del Producto
Cantidad
Unidad
Pieza
Soporte para ordenar muestras, personalización, venta al por mayor directa y pago completo. Si el producto que busca no tiene contenido personalizado correspondiente, complete el formulario a continuación para contactarnos y le responderemos lo antes posible.